
Introduzione
Uno dei possibili criteri per definire una potenziale capacità intellettiva è sicuramente quello di considerare “intelligente”, il comportamento atto ad utilizzare degli strumenti per raggiungere degli scopi.
Con il termine “teleologia” (dal greco τέλος (télos), fine, scopo e λόγος (lógos), discorso, pensiero) si potrebbe intendere una attitudine innata, che concepisce il perseguimento di atti orientati ad una finalità non solo nella comune attività volontaria dell’uomo, o di altre entità che dispongono di capacità razionale indirizzate alla realizzazione di uno scopo, ma anche in quelle azioni involontarie e inconsapevoli che tuttavia realizzano un fine.
Sul modello dell’azione intenzionale dell’uomo, che subordina i mezzi al conseguimento di un fine, il finalismo ha esteso questo comportamento teorizzando che esso sia rintracciabile nell’intero universo.
In particolare, in biologia un concetto ispirato al finalismo è espresso dal termine “teleonomia” usato per la prima volta (1970) da Jacques Monod nella sua teoria che vedeva all’interno delle strutture degli esseri viventi un’azione finalistica, causata dalla selezione naturale, diretta a favorire le funzioni vitali eliminando quelle che le ostacolano.
Me lo ricordo, in quanto il suo libro “Il caso e la necessità” fu sicuramente un testo che lasciò delle belle impronte sul mio modo di pensare.
Sotto questo aspetto, possiamo dire che, non solo l’uomo è un essere “teleologico”, ma lo possono essere anche gli animali, e perché no, anche delle “entità artificiali”.
Gli strumenti di lavoro, che possiamo considerare degli “ausilii”, con i quali riusciamo a fare determinate operazioni che, con i nostri soli arti, non riusciremo a compiere, sono sicuramente la dimostrazione pratica che, per raggiungere uno scopo, utilizziamo le nostre capacità intellettuali, comprese quelle di “creatività”, di “astrazione”, “immaginazione”, di “teorizzazione”, ovvero, tutte le facoltà mentali in grado di generare delle “inferenze” nella composizione concettuale delle informazioni, ma non siamo gli unici a farlo, nel mondo animale, avviene qualcosa di simile, magari ad un livello applicativo che comporta delle attitudini mentali più elementari.
I primati, sicuramente hanno insite queste capacità, ma non solo loro, lo fanno anche i delfini, gli elefanti, le nutrie, e persino i corvi e i fringuelli.
Alcuni animali quindi, sanno distinguere gli oggetti e catalogarli per la loro utilità, alcuni animali, a modo loro, sanno compiere persino delle elementari operazioni matematiche, questa rappresentazione mentale della grandezza è chiamata numerosità, e sembra essere un’abilità condivisa da molte specie animali.
Una curiosità: le scimmie avrebbero dei neuroni nella corteccia prefrontale che mostrano una preferenza per lo zero, invece che per altre numerosità; anche le api sembrano afferrare il “concetto di zero”, una cosa incredibile se pensiamo che stiamo parlando di insetti con meno di un milione di neuroni (in confronto agli 86 miliardi presenti nel nostro cervello), e pure i corvi comprendono “il concetto di insieme vuoto”: ciò che stupisce gli esperti è il fatto che diverse specie animali (insetti, mammiferi, uccelli), evolutesi indipendentemente l’una dall’altra centinaia di milioni di anni fa, siano in grado di trattare lo zero come una quantità, a dimostrazione del fatto che questa abilità si sarebbe evoluta in modo indipendente tra le varie specie.
Da parte mia non scomoderei la parola “concetto” utilizzata in questo articolo di Focus: https://www.focus.it/ambiente/animali/animali-sanno-contare-numeri.
Parlerei piuttosto di “giochi attenzionali” come riferiva nei suoi studi il professor “Silvio Ceccato”, tanti anni fa, nei suoi libri.
Nel sistema di comunicazione animale, non parlerei di potenzialità “concettuali”, ma di espressioni “fisiognomico – fonetiche”, per quanto codificabili, in una forma di linguaggio elementare.
Ad esempio, gli scimpanzé sono in grado di emettere dei vocalizzi utilizzando una dozzina di suoni ‘base’ (come grugniti, latrati, urla e piagnucolii) combinati in almeno 390 modi diversi secondo regole ben precise. ( fonte ANSA).
Ovviamente ci sono molti altri animali a a comunicare con “sistemi complessi”, non dimentichiamo i cetacei, i delfini, ma anche i nostri gattini.
Io ritengo che siano più bravi gli animali a comprendere dei linguaggi a loro non conformi che noi esseri umani, loro probabilmente hanno un limite fisiologico nell’emettere dei suoni, ma sicuramente hanno delle maggiori potenzialità istintive nel decodificare i segnali.
Le nostre potenzialità di interpretare i segnali, come quelle degli animali, sono fondamentalmente dovute a delle “catene neurali” appositamente attivabili a questo scopo, così come la capacità di trasferire delle informazioni attraverso il linguaggio, il ché, prevede che ci siano delle potenzialità mnemoniche, alle quali, sia noi, come gli elefanti o altri animali, dobbiamo attingere a quella che chiamiamo memoria, a breve ed a lungo termine.
A mio avviso dunque, la potenzialità di costruire, o quantomeno di utilizzare degli strumenti, implica una potenzialità elaborativa estremamente complessa, sia che lo faccia un componente del genere umano, sia che lo faccia un qualsiasi altro essere.
Tra tutti gli strumenti realizzabili però, ce ne sono alcuni che possono essere realizzati per degli scopi ben precisi, quelli di essere degli “ausilii personali”, che, tradotto in altri termini significa che, coloro che gli hanno realizzati, possedevano un grado culturale tale da “inventare” degli strumenti atti a sopperire delle deficienze strutturali al proprio organismo, o a quello di esserei simili, in questo, nessun animale che conosco, possiede tali capacità e, a dire il vero, credo che i primi esempi di tali ausilii, siano stati realizzati da membri di civiltà, a noi relativamente vicine in termini temporali:

Protesi rinvenuta in Egitto
Da quel momento, l’evoluzione del genere umano, ha permesso di elaborare moltissimo il concetto di “Ausilio personale”, o “Protesi”, la “Medicina” degli antichi, la chirurgia, in particolare, ha compiuto passi da gigante arrivando a concepire qualcosa come “Telepathy” il primo chip impiantato nel cervello di un essere umano dalla Neuralink, l’azienda fondata e finanziata da Elon Musk.
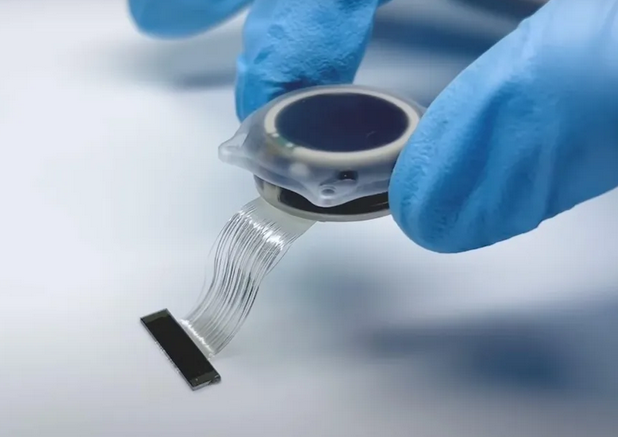
Nonostante il nome, però, Telepathy non legge il pensiero: coglie dal cervello i segnali legati all’intenzione di fare un movimento e li traduce in modo che un robot all’esterno possa compiere quella precisa azione al posto di chi è paralizzato o paraplegico.
La Nanorobotica
La nonorobotica è quella parte di studi tecnologici che ha come oggetto la realizzazione di robot su scala nanometrica, basti pensare che, per “robot su scala nanometrica”, si intendono i nanorobot – o “nanobot” che sono “dispositivi” la cui grandezza varia da 0,1 a 10 micrometri.
Rammento che nanometro (nm) (10-9 m) corrispondente quindi alla miliardesima parte del metro e un micrometro (µm) (10-6 m) ovvero, alla millesima parte del millimetro.
Questa branca tecnologica inizia a prendere piede nei primi anni del 2000, quando il ricercatore americano Carlos Montemagno e il suo team, presso l’Università della California, a Los Angeles, sviluppano il primo nanorobot a “carburante glucosico”, non più spesso di un capello umano.
Questo nanobot, la cui propulsione venne realizzata ricorrendo a un minuto frammento di muscolo cardiaco di un topo, era in grado di muoversi a una velocità di circa 40 micrometri al secondo.
I nanorobot sono a tutti gli effetti macchine sufficientemente piccole, da penetrare una cellula vivente (animale o umana) per rilasciarvi molecole, aggredire masse tumorali, sostituire o riparare organuli o effettuare tutte quelle operazioni che, normalmente, richiedono manovre di microchirurgia invasiva.
Dopo le prime sperimentazioni del team del professor Montemagno, nel 2005 gli stessi scienziati californiani hanno progettato un nanorobot con due minuscole zampe, capaci di muoversi e di piegarsi grazie a giunture meccaniche alimentate dalle cellule di muscolo cardiaco di ratto, senza bisogno di alimentazione esterna.
Da quel momento in poi, numerosi studi si sono succeduti e, ad oggi, gli esempi di nanobot sono molteplici.
Nell’ultimo decennio, con l’evoluzione di tecniche di nanofabbricazione, l’obiettivo di creare minuscoli robot biocompatibili, dalle dimensioni di una cellula e in grado di essere iniettati nel corpo umano e, al suo interno, di muoversi, di essere operativi, come fa, nella realtà, un robot di grandezza naturale sta divenendo, via via, un traguardo sempre più vicino.
Il primo aprile del 2019 pubblicai questo articolo sul mio blog personale www.cyberservices.it
Quello a cui potrei fare riferimento, in termini pratici però, è dovuto alla mia collaborazione con il Prof. Marco Gottardo che, ancora nel 2013, pubblicò un testo nel quale trattava la costruzione di un arto robotico, a scopo didattico che considero una pietra miliare della Robotica sia hobbistica che professionale per la costruzione di arti e protesi.
Questo testo propone le basi per la realizzazione di un arto human like, a partire dall’articolazione della spalla, in gomito, il polso, e la mano completa di dita con pollice opponibile.
La programmazione dei microcontrollori e spiegata in maniera chiara semplice ed essenziale.
I codici sorgenti, per il controllo dei 14 servomotori, e i sorgenti delle interfacce .net sono forniti in maniera completa e testata.
La piattaforma hardware e la nota Micro-GT mini disponibile online by G-Tronic robotics.
E’ un testo non molto recente, ma credo che sia una base didattica di tutto rispetto per chi, intendesse iniziare gli studi di ronbotica applicata agli ausilii personali.
Vorrei ricordare che solo in Italia, ogni anno, si stima un numero di 3600 amputazioni di arto superiore, di cui l’80% riguardano la mano.
Nel mondo circa 3 milioni di persone presentano un’amputazione a livello dell’arto superiore.
Si può solo immaginare quali conseguenze possano portare tali amputazioni.
Le protesi in silicone sono spesso utilizzate dai pazienti con arti amputati perché economiche, facili da indossare e in grado di ripristinare una apparenza estetica accettabile.
Negli “Ausilii intelligienti”, o protesi intelligenti, la comunicazione tra paziente e protesi può avvenire per mezzo di segnali EMG o elettroencefalogrammi (EEG).
I segnali EMG, prodotti dai muscoli rimanenti dell’arto superiore, vengono registrati da sensori posti all’interno della protesi a livello dell’interfaccia protesi-pelle e permettono l’attuazione di un determinato movimento. Infatti, ogni volta che un muscolo del corpo si contrae, viene prodotto un piccolo segnale elettrico che i sensori mioelettrici inseriti nella protesi captano. Purtroppo, questi segnali mioelettrici non sono facilmente rilevabili a causa della lesione all’arto del paziente. In questo caso, i segnali EEG sono utili alternative. I segnali EEG vengono registrati mediante elettrodi superficiali a contatto con il capo o elettrodi impiantati mediante procedura chirurgica più invasiva. In alcuni studi è stata presentata addirittura una strategia ibrida basata sulla registrazione di segnali EEG e EMG in grado di ottimizzare la registrazione e la conseguente risposta a livello del movimento protesico.
Queste braccia artificiali “intelligenti” sono il risultato di collaborazioni tra esperti in diversi settori: dalla medicina all’ingegneria meccanica, dall’ingegneria elettronica all’ingegneria biomedica, dalla fisioterapia all’ingegneria dei materiali.
Si pensi che il paziente può essere persino in grado di ottenere un feedback sensoriale, grazie a un circuito chiuso che dall’output esterno consente di ricavare un segnale per il paziente.
Nell’evoluzione delle applicazioni inerenti gli ausilii personali, credo si debba segnalare che la malattia di Parkinson è una delle principali cause di disabilità: riguarda oltre 9,4 milioni di persone in tutto il mondo e si prevede che il numero raddoppierà entro il 2040.
Si tratta di una malattia neurodegenerativa progressiva che colpisce uno specifico tipo di neuroni, detti dopaminergici, che controllano i movimenti.
Per questo, fino all’80% dei pazienti con malattia di Parkinson va incontro a problemi di movimento e deambulazione, inclusa la FoG.
I sintomi iniziano lentamente e, inizialmente, può essere notato un tremore appena percettibile in una sola mano.
I tremori sono tra i sintomi più comuni ma il disturbo può anche causare rigidità o rallentamento dei movimenti.
La FoG, in particolare, limita gravemente il movimento fisico e la qualità della vita, e i trattamenti esistenti forniscono solo un sollievo temporaneo e a breve termine.
UNA TUTA ROBOT PER MIGLIORARE LA FOG

Fino ad oggi non esistevano tecnologie robotiche specifiche per la FoG nella malattia di Parkinson. Questo, probabilmente, a causa della complessità del sintomo di congelamento della marcia, che comporta interruzioni biomeccaniche nella meccanica del cammino. Un recente studio pubblicato sulla rivista Nature Medicine che, per ora, ha coinvolto solo un partecipante, ha permesso di mettere a punto e valutare l’efficacia di una tuta robotica nel migliorare l’andatura del paziente affetto da Parkinson. In sostanza, l’abbigliamento robotico provato dal paziente, progettato per assistere la flessione dell’anca, consisteva in fasce per le cosce, cinture in vita e spallacci, con degli attuatori e sensori montati sulla cintura.
Gli attuatori generano il movimento di flessione dell’anca, mentre un controller eroga la forza corretta per il movimento.
Lo studio è durato 6 mesi, durante i quali sono stati testati gli effetti della tuta sull’andatura. L’abbigliamento robotico ha dimostrato di migliorare significativamente e in modo immediato l’andatura del paziente.
Un passo, quindi, non solo per il singolo paziente, ma per affrontare un’esigenza critica nella gestione della malattia di Parkinson nel suo complesso.
(fonte: www.fondazioneveronesi.it)
Personal bot
Robotica cognitiva per la neuroriabilitazione: uno dei campi in cui degli “Ausilii intelligenti”, sono richiesti, riguarda sicuramente le applicazioni inerenti la neuroriabilitazione robotica per studiare i meccanismi di controllo motorio del soggetto umano e sviluppare tecnologie utili nei programmi dedicati.
Da qui, la robotica quale strumento per eseguire esercizi cognitivi.
In Italia, ad esempio, Federica Piras, responsabile degli studi neurolinguistici condotti presso il laboratorio di Neuropsichiatria della Fondazione Santa Lucia IRCCS di Roma e dei protocolli di valutazione neuropsicologica per lo studio delle capacità cognitive nelle malattie psichiatriche, insieme al team del laboratorio di Neuropsichiatria della Fondazione, sta studiando le possibilità offerte dai robot per tenere costantemente in esercizio, anche a casa, le funzioni cognitive, soprattutto nelle persone anziane.
Il sistema permette la valutazione costante di una serie di parametri, anche su tono dell’umore e benessere auto-percepito, fornendo un programma di stimolazione personalizzato.
La neuroriabilitazione robotica (ad esempio, per far svolgere ai degenti esercizi ripetitivi) comincia a trovare applicazione anche nel supporto agli anziani che, trovandosi ad affrontare una serie di sfide correlate alla loro età, intendono (a ragione) mantenere la propria autonomia il più a lungo possibile.
Il fatto che sia un robot umanoide a fornire indicazioni (i “consigli” e suggerimenti per uno stile di vita sano o le sollecitazioni per lo svolgimento del piano di attività giornaliero) nasce dall’osservazione, comprovata scientificamente, che gli anziani si sentono meno criticati o giudicati quando dei test di valutazione sono somministrati da un robot umanoide rispetto ad un operatore, mentre mostrano livelli di coinvolgimento più elevati quando le attività di stimolazione sono svolte mediante un robot, rispetto all’uso di un tablet”.

L’invecchiamento della popolazione comporta una maggiore incidenza delle malattie correlate a questa fascia d’età, come la demenza senile. Secondo le stime attuali, entro il 2050 ci saranno oltre 130 milioni di persone con demenza in tutto il globo.
Bambini e autismo
I trattamenti, che spaziano dalla terapia cognitiva a quella logopedica, fino alla neuro-psicomotricità, oggi sono supportati anche dall’utilizzo delle nuove tecnologie.
È il caso di QT robot, un umanoide che aiuta i bambini con autismo ad imparare nuove competenze comunicative, emotive e sociali. «QT è stato realizzato da una start-up di Lussemburgo – spiega Veronica Scordino, logopedista e linguista del CRC (Centro Ricerca e Cura) -. Il robot è in grado di stimolare il bambino durante le sue attività terapeutiche, aumentano sia il livello che i tempi di attenzione.
Il bambino può interagire direttamente con il robot, tanto da diventare un vero e proprio compagno di viaggio lungo il percorso riabilitativo. «C’è chi, tra i bambini in trattamento, si è talmente affezionato a QT da abbracciarlo e sussurrargli “ti voglio bene”.
Il mercato dei personal-bot
In un articolo sulla rivista Autism Research gli esperti hanno dimostrato per la prima volta al mondo l’efficacia di un robot umanoide in un contesto di questo tipo.
Non, dunque, in laboratorio ma integrato in un percorso riabilitativo clinico.
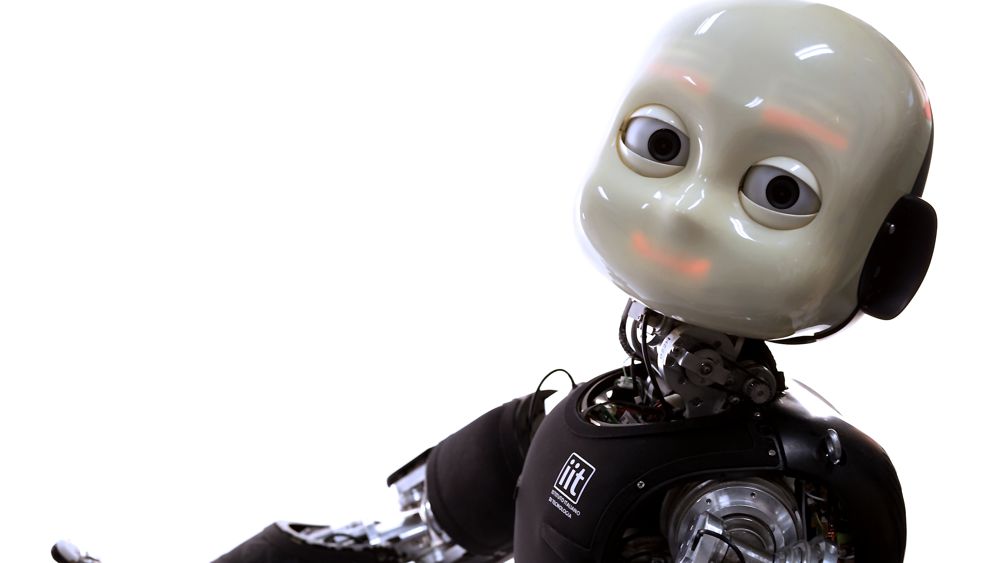
Si tratta ovviamente del ben noto robot iCub di IIT, piattaforma intorno alla quale da molto tempo l’IIT porta avanti le ricerche nei diversi ambiti d’interesse dell’istituto.
Il disturbo dello spettro autistico è un insieme eterogeneo di disturbi del neurosviluppo che esordisce nel corso dell’età evolutiva, caratterizzato da deficit comunicativi e nell’interazione sociale.
Sulla base delle ricerche epidemiologiche condotte a oggi, l’autismo colpisce tra l’1% e il 2% della popolazione mondiale. In Italia, le persone interessate dall’autismo sono tra le 600mila e 1,2 milioni.
Ad almeno 4mila individui sui 393mila nuovi nati nel 2022 nel nostro paese saranno probabilmente diagnosticati disturbi di questo tipo nel corso della loro età evolutiva.
Ma iCub è un robot androide costruito dall’Istituto Italiano di Tecnologia (IIT) di Genova.
Alto 104 cm e pesante 22 kg, la sua estetica e funzionalità ricordano quelle di un bambino di circa tre anni. Il suo costo però è di 200.000 – 300.000 €.
Un altro prodotto italiano è Abel, a un primo sguardo, sembra un normale bambino di 12 anni, ma è un robot umanoide, un androide per la precisione.
Ha visto la luce nei laboratori del centro di ricerca E. Piaggio dell’università di Pisa, frutto di un progetto che ha unito assieme robotica sociale e affective computing.

Abel è un’eccellenza mondiale della robotica sociale.
Ed è solo un esempio che racconta quello che sta accadendo a Pisa negli ultimi anni sul fronte della robotica e dell’intelligenza artificiale. Le sue espressioni sono mosse da 22 motori che replicano con precisione i movimenti di un volto umano.
I software e i sensori che lo animano riescono a stimare in tempo reale lo stato psicofisico del suo interlocutore.
Il suo prezzo però, credo sia ancora improponibile per un utilizzo famigliare.
Robot umanoide Grace pensato per affiancare anziani e persone in isolamento o ospedalizzate:

Ha tratti asiatici, capelli castani lunghi che le arrivano al colletto della divisa ed è dotata di termocamera, installata sul petto, per misurare la temperatura e la reattività del paziente.
Usa l’intelligenza artificiale per assistere i pazienti, parla fluentemente tre lingue (inglese, mandarino, cantonese) e afferma di “potere fare terapia e supportare il lavoro degli operatori sanitari”.
Anche in questo caso, il prezzo non è noto.

Ma è Sophia il robot dei record: primo e unico robot-cittadino, per ottenuto, nell’ottobre del 2017, la cittadinanza di uno Stato, l’Arabia Saudita; primo robot-artista, per aver realizzato, a marzo 2021, un proprio autoritratto, venduto all’asta ad aprile dello stesso anno per 688.888 dollari, credo che possa essere adatto anche per assolvere dei compiti come quelli richiesti per l’assistenza a bambini e ad anziani, ma anche in questo caso, ritengo che costi molto più che una badante.
Non poteva mancare Romeo:

Romeo, un umanoide badante che aspira a ottenere una posizione sempre più rilevante nell’ambito dell’Assistenza agli Anziani.
Ma attenzione: non stiamo parlando di un robot che sostituirà il contatto umano, piuttosto di uno strumento che integrerà le capacità dell’uomo offrendo un aiuto, ad esempio, durante quelle ore del giorno in cui il caregiver riposa, l’assistente deve uscire per fare la spesa o i familiari sono fuori casa per lavoro.
È alto 140 cm, una statura ideale che gli permette di avvicinarsi al letto di un anziano senza doversi piegare e, di conseguenza, occupare più spazio o andare incontro ad altri inconvenienti tecnici. Può aprire porte, camminare, salire scale, afferrare oggetti posizionati su un tavolo e trasportarli fino alla persona assistita.
In questo momento, Romeo dovrebbe essere ancora nella fase finale della sperimentazione che ne precede il suo ingresso negli ospedali e nelle case di accoglienza.
Romeo si unirà a una lunga serie di robot che hanno lo scopo di intrattenere e aiutare a prendersi cura. Bruno Maisonnier, fondatore e CEO di Aldebaran.
Per inciso: i lavori sul progetto Romeo sono iniziati all’inizio del 2009 con un budget di 10 milioni di euro, di cui circa la metà è stato finanziato dal governo.
Conclusioni
Io sono del parere che, gli animali da compagnia, o d’affezione, come dir si voglia, siano importanti per determinate categorie di persone, in particolare, anziani e bambini con certe problematiche, ma sono anche convinto che, con un po’ di buona volontà, e delle iniziative intelligenti, si possano realizzare degli “Ausili intelligenti”, a basso impatto economico, in grado di apportare dei benefici in termini di assistenza.
Qualcuno afferma che attualmente questi robot non rispondono pienamente alle esigenze delle persone anziane: i progettisti e gli sviluppatori non conoscono i reali bisogni e le aspettative di questi utenti, anche perché la ricerca sull’uso dei robot nella popolazione geriatrica è all’inizio e gli studi scientifici sulle persone anziane richiedono molto tempo.
Senza contare che l’uso di nuovi dispositivi tra utenti anziani può essere ostacolato da diversi fattori come problemi di memoria, apprendimento e orientamento.
Per superare questi ostacoli occorrerebbe incentivare la ricerca e promuovere prototipi funzionali alle esigenze dell’utente.
Si parla a questo proposito di ricerca “user centred”, centrata sull’utente e guidata dai suoi bisogni e aspettative.
Per le persone anziane ci vorrebbero tecnologie con interfacce semplici e intuitive con la possibilità di personalizzare le funzionalità e che offrano utilità reale nella vita quotidiana.
Il lavoro della ricerca è appena iniziato, sarà lungo e complesso e dovrà affrontare non solo aspetti funzionali ma anche questioni sociali, legali ed etiche.
La robotica assistiva potrebbe davvero aiutare nella gestione dell’invecchiamento della popolazione e del conseguente impatto sulla salute pubblica.
La robotica assertiva, potrebbe anche aiutare i bambini nelle fai di apprendimento, ad esempio con semplici interfacce interattive, non credo servano grandi investimenti economici, in questo campo potrebbe avere una sua collocazione anche l’apporto della filosofica “Open Source”, di cui io sono un sostenitore, a tal proposito ho scritto questo testo:
La filosofia Open Source, sia per quanto riguarda manufatti hardware che prodotti software, è una tendenza sociale controintuitiva, una scuola di pensiero che ha guidato alcune delle più grandi rivoluzioni informatiche degli ultimi decenni e che, mi auguro, possa in futuro sfociare su molti altri ambiti dell’operare umano.
I principi fondanti di questo movimento, sono ispirati alla condivisione, alla sinergia e alla sussidiarietà, in contrapposizione alla competizione e alla concorrenza.
Con questo libro, spero di poter apportare un mio modesto contributo alla divulgazione di quello che, personalmente considero fondamentale per un cambio di paradigma, non solo in ambito dello sviluppo di nuove prospettive su innovazioni informatiche, ma anche di stimolo per ulteriori potenzialità in ambito collaborativo inerente lo sviluppo di manufatti tecnologici di nuova generazione, dove le buone pratiche DevOps, possono facilitare questo ambito contestuale.
Nel libro sono riportati esempi pratici, alcuni famosi, altri meno, che sono stati realizzati usufruendo delle licenze Open Source.
Confido che, la lettura di questo testo possa indurre molti, professionisti o meno, a considerare l’Open Source, come una formidabile opportunità sociale, anche in ambito lavorativo, essendoci molti strumenti messi a disposizione per chi, vuole intraprendere un percorso interessante, sia in ambito professionale che hobbistico.
Io sono a disposizione, per quanti fossero interessati a sviluppare una piattaforma orientata a questa tipologia di utilizzo, ho già condotto studi in tal senso, con la piattaforma Q.bo STEM, che a tal proposito può fornire qualche indicazione sul mondo della robotica:
Mi piacerebbe, a questo punto, trovare qualcuno, che, sensibile a questi temi, possa investire nella realizzazione di manufatti utili, sia per bambini, ma anche per anziani o per persone che necessitino di usufruire “Ausili personali intelligenti”.
Una idea potrebbe essere quella di realizzare un robottino simile a questo:

Per ulteriori informazioni sul framework Cheshire Cat A.I.:
https://cheshire-cat-ai.github.io/docs
Grazie per l’attenzione dedicata a questa lettura
Romeo Ceccato